Dopo una serie di valutazioni effettuate il Progetto PEDROS: Perimetrazione automatica di incEndi con DROne con Sensore Specifico, progetto che potrebbe essere usato a sostegno delle aree boschive aggredite da insetti/patogeni e/o da incendi boschivi, sta arrivando verso lo sviluppo finale.
ISPRA riporta che aumenta l’estensione delle aree percorse da grandi incendi boschivi in Italia nel 2023, prossimi a 69000 ha, di cui più di 10000 ha di ecosistemi forestali al 31 agosto 2023. Le foreste coinvolte risultano in gran parte macchia mediterranea e leccete (61%) e superfici ricoperte da boschi e rimboschimenti di conifere (21%).
Il 71% delle aree bruciate fino ad oggi sono in Sicilia (75%) e Calabria (17%). Le province con la maggiore superficie interessata da incendi sono: Palermo (oltre 16700 ha, di cui il 19% foreste), Reggio Calabria (più di 8725 ha, il 17% di foreste), Agrigento (oltre 8400 ha, il 2% di foreste), Caltanissetta (oltre 5700 ha, il 5 % di foreste), Trapani (più di 4500 ha, il 10% di foreste) e Siracusa ( con oltre 4300 ha, il 23% di foreste).
PEDROS si è proposto di offrire un sostegno ai Servizi Civili per mezzo di un sistema a pilotaggio remoto con definizione di traiettoria in automazione tramite riconoscimento in tempo reale di area percorsa da incendio, assistito da sensore aviotrasportato e sistema satellitare. Il cuore di questo sistema è il sensore specifico equipaggiato sui droni, progettato per acquisire dati multispettrali nei canali NIR (Near Infrared) e SWIR (Short-Wave Infrared). Questi dati sono fondamentali per la generazione di immagini dettagliate che, in seguito, saranno elaborate per condurre un'analisi approfondita delle aree colpite dal fuoco.

Realizzazione del Sistema UAS
Il Team di Alma Sistemi sta realizzando il sistema compreso di disegno meccanico, assemblaggio delle componenti e riadattamento del case contenitivo del Sistema PEDROS che verrà montato sul DJI Matrice 350 RTK. Il peso finale del sensore sarà di circa 2,5 Kg. Peso che il drone in questione può sostenere.

Nell'immagine qui sotto possiamo vedere il disegno di PEDROS: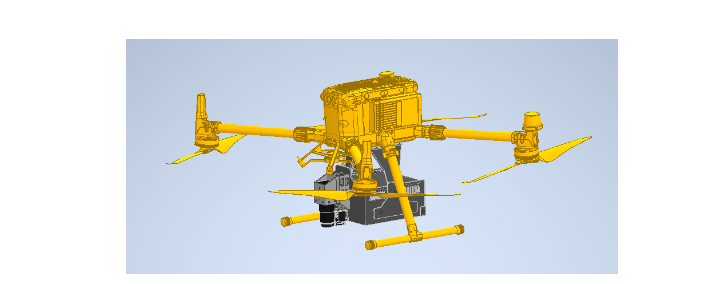
Possibile sviluppo futuro e miglioramento:

Qui sopra il supporto specifico, realizzato in ABS con stampante 3D, in corso di ottimizzazione e miglioramento. Ovviamente tutte le modifiche che comportano un aumento di peso del payload, devono essere realizzate tenendo conto che la capacità di carico massimo del drone è pari a 2.7 kg.
Specifiche del Sensore
Le specifiche del sensore PEDROS sono fondamentali per garantire la qualità e l'efficacia delle immagini catturate per il funzionamento dell'algoritmo di post-processing che sta realizzando la Scuola di Ingegneria Aerospaziale della Sapienza.
Canali Multispettrali:
Il sensore deve essere in grado di catturare dati nei canali NIR (Near Infrared) e SWIR (Short-Wave Infrared), consentendo la raccolta di informazioni critiche sulla vegetazione e sulle condizioni delle aree boschive.
Risoluzione Spaziale:
La risoluzione spaziale delle immagini deve essere sufficientemente alta da permettere la rilevazione di dettagli importanti all'interno delle aree monitorate.
Precisione Radiometrica:
Il sensore deve possedere una precisione radiometrica adeguata a garantire dati affidabili e coerenti per il post-processing.
Georeferenziazione dell'immagini:
Il computer di bordo acquisisce i dati da GPS, e quindi fornisce informazioni sulla posizione del drone, come l'ora corrente, la latitudine, la longitudine e l'altezza, li scrive nel file immagine intercambiabile (EXIF) di ciascuna immagine aerea. Questi dati, insieme ad altri parametri, sono essenziali per la georeferenziazione e successivo avvio dell'algoritmo di post-processing.
Velocità di Campionamento:
La velocità di campionamento deve essere ottimizzata per la traiettoria del drone, consentendo acquisizioni rapide e regolari.
Procedure di Test di PEDROS
Calibrazione del Sensore:
Prima dell'uso operativo, il sensore deve essere accuratamente calibrato per garantire l'accuratezza dei dati acquisiti.
Reflectance = slope × DN + intercept
Test di Performance in Condizioni Simulate:
Vengono condotti test in laboratorio o in condizioni simulate per valutare la capacità del sensore di riconoscere in modo affidabile le variazioni nei canali NIR e SWIR in diversi scenari.
Test di apertura immagine e lettura della metadata:
Viene avviato l'algoritmo di post-processing per verificare che l'immagini scattate dal sensore abbiano il minimo requisito per essere manipolate con la libreria gdal.
Test di Campo:
Il sensore viene testato in ambienti reali, come aree boschive colpite da insetti, patogeni o incendi. Durante questi test, vengono acquisite immagini reali per valutare la qualità e l'efficacia delle informazioni catturate. Inoltre, si verifica il corretto funzionamento dell'algoritmo di post-processing
Verifica della Corrispondenza tra Dati e Analisi Post-processing:
I risultati delle analisi post-processing potrà essere confrontato con il software metashape di Agisoft oppure con il sistema di monitoraggio di aree bruciate (dati Sentinel-2) della scuola di ingegneria Aerospaziale per garantire che i dati raccolti corrispondano alle aspettative e alle esigenze del progetto.
Ottimizzazione delle Traiettorie dei Droni:
Vengono eseguiti test per ottimizzare la traiettoria dei droni durante il volo, garantendo una copertura efficiente dell'area bersaglio.
Sviluppo dell'Algoritmo di PEDROS
L’algoritmo prodotto nell’ambito del progetto è stato sviluppato tenendo conto dei seguenti requisiti: garantire la interoperabilità dei dati, capacità di gestire un significativo flusso di dati, ma soprattutto costituire una significativa evoluzione rispetto allo stato dell’arte nel processo di rilevamento remoto dei cambiamenti, permettendo la identificazione, da immagini acquisite in tempo reale, dei cambiamenti nella vegetazione.

Lo sviluppo del software necessario all’implementazione dell’algoritmo è avvenuto interamente in ambiente Miniconda, edizione minimale del più noto Anaconda, la cui versione più recente è basata su Python 3.9. In particolare, i pacchetti di terze parti utilizzati sono i seguenti:
• GDAL (Geospatial Data Abstraction Library) per la manipolazione di dati GIS di tipo sia raster che vettoriale.
• NumPy: per operare matematicamente sugli array.
• Scikit-image: per il processamento delle immagini anche attraverso algoritmi di machine learning e computer vision.
L’algoritmo in Python è composto da 4 sottosistemi principali:
• Sistema di elaborazione dati: Una volta acquisita un’immagine dal sensore a bordo del drone, il file viene elaborato tramite gli algoritmi dedicati alla generazione di prodotti, che includono il calcolo di una serie di indici per mappare e monitorare gli effetti degli incendi in tempo reale.
• Soglie Ottimali e Classificazione: Il flusso dell’algoritmo continua applicando soglie fisse, basate su statistiche con l’intento di stabilire quali siano le migliori soglie delle bande spettrali e degli indici calcolati per classificare le classi: bruciato, non bruciato. Questa parte dell’algoritmo si è resa necessaria in assenza della immagine pre- incendio normalmente utilizzata per stimare le aree bruciate da dato satellitare.
• Poligonizzazione e Way Point: Successivamente, l'algoritmo poligonizza l'immagine raster binaria (bruciato/non bruciato) ed estrae il poligono relativo ai pixel con valore diverso da zero. Viene creato anche un file di testo che contiene le coordinate dei vertici del poligono, che servono al sistema di guida del drone per acquisire nuove immagini.
• Perimetrazione: Infine, quando il ciclo di acquisizione delle immagini è chiuso, l'algoritmo unisce i file poligonizzati dell'area percorsa dal fuoco in un unico dataset vettoriale. Il formato utilizzato è lo Shapefile (.shx, .dbf, .shp, .prj)."
Il progetto è stato finanziato dall'Agenzia Spaziale Italiana ASI N. 2021-10-E.0, e sono in corso i test finali.
Ulteriori informazioni sullo sviluppo e sui test di volo di PEDROS saranno rese note in ottobre 2023.
Fonte: ( ALMA SISTEMI srl )